Yesterday, 14 September 2016, Daphne Karreman from the UT successfully defended her PhD thesis entitled “Beyond R2D2: The design of nonverbal interaction behavior optimised for robot-specific morphologies“.
One of the members of the PhD graduation committee was unable to attend in person but participated via Skype.
During the party that evening – with a little help from her colleagues – Daphne took us on a guided tour down memory lane. Video-messages of congratulations went sent by the FROG partners.
For the project, an array microphone was temporarily fitted to the red FROG so that it could pick up questions asked by visitors to the museum. Due to the high noise levels they encountered the, otherwise successful, project used a Wizard-of-Oz set-up to answer questions. The results of the project will help in the further development of the R3D3 receptionist robot.
Although they are now all working on different projects, Randy and Jan keep in touch with Noé via Skype and Facebook and, sometimes, after office hours they still find time to work together on one of their favourite FROG robots.
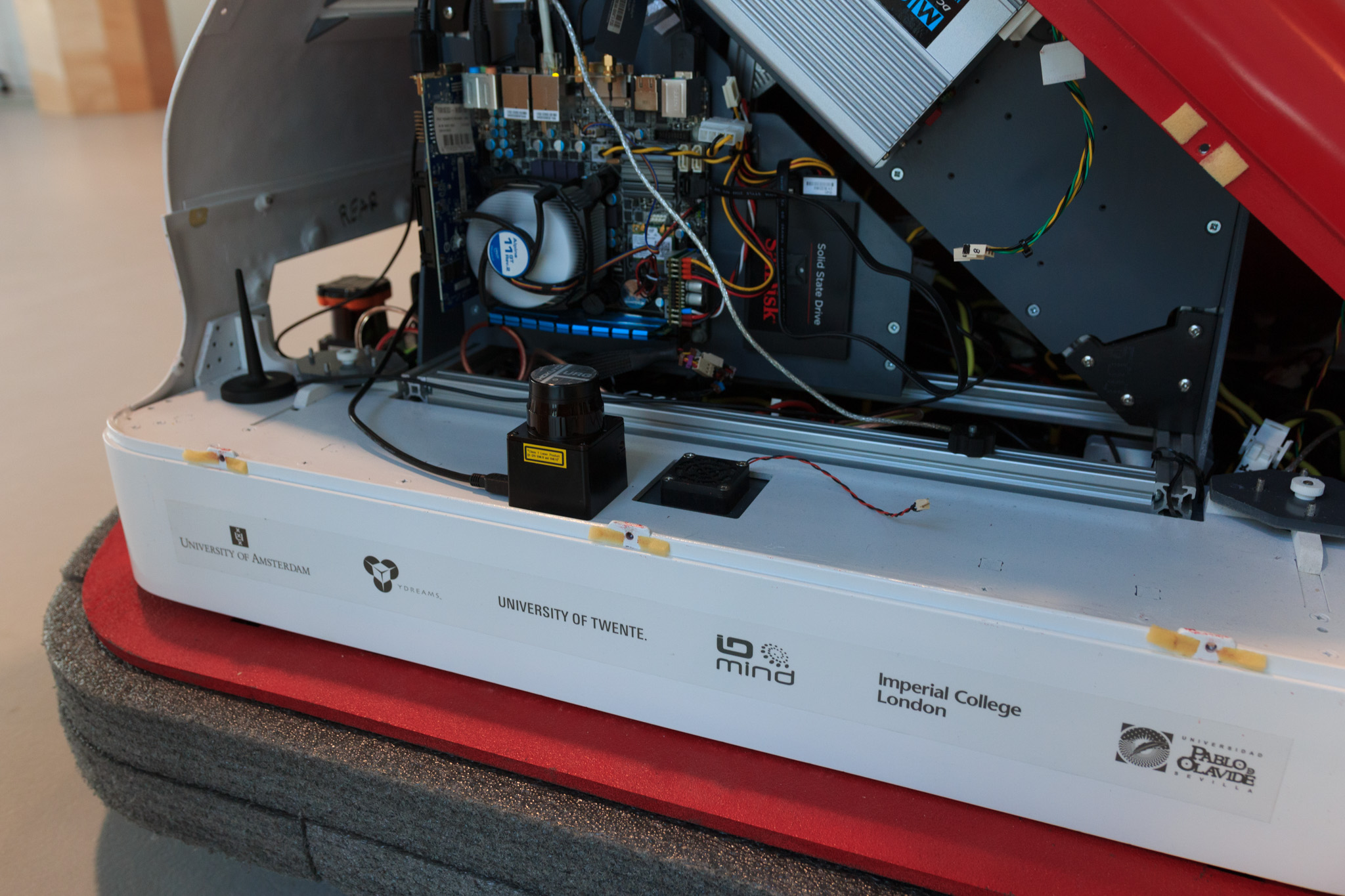
Recently Jan and Randy fitted 2 extra lasers to cover some blind spots at the sides to FROG – this meant they had to make holes in the shell (shhh ….. nobody tell Paulo!).
The extra lasers allow protoFROG (aka the Campus Robot) to navigate better through spaces and some corners inside its new seasonal home, the DesignLab.
There, HMI Masters‘ students are using FROG as a platform for researching receptionist robots as part of the R3D3 project (part of the Dutch national COMMIT program).
Vanessa Evers is coordinator of the FROG project on behalf of UvA. She is chair of the Human Media Interaction (HMI) group at the University of Twente in the Netherlands.
Vanessa and Ioannis with a very young FROG – May 2013
Betsy van Dijk
Betsy van Dijk was with the project until she became ill in 2013. Betsy is recovering: the FROG team misses her.
Betsy, Vanessa and Daphne – daily supervisor, promotor and PhD candidate – in Seville, May 2012
Daphne Karreman – Seville, February 2014
Daphne Karreman is working on the development of personality and behavior of a Fun Robotic Outdoor Guide. In her free time she plays the cello and is learning to build violins.
Randy Klaassen – November 2014
Randy Klaassen is finishing his thesis on Health Behaviour Change Support Systems which he will be defending on 27 February 2015.
Randy and Jan joined the project with just five months to come up with a working solution for the FROG state machine, augmented reality and personality.
Preparations in simulation on the red FROG in Twente – November 2014.Testing the projectorThe real thingSlowly! November 2014
The other side of the camera for once
Lynn Packwood – day-to-day project manager for FROG – usually only to be seen as a shadow or in a Tilley hat – and author of this blog.
FROG has appeared on tweakers.net a Dutch website featuring news and information about hardware, software and the Internet. Members of the UT team explained and demonstrated the various capabilities of the robot. You can find the clip (which is in Dutch) here: FROG on tweakers.net
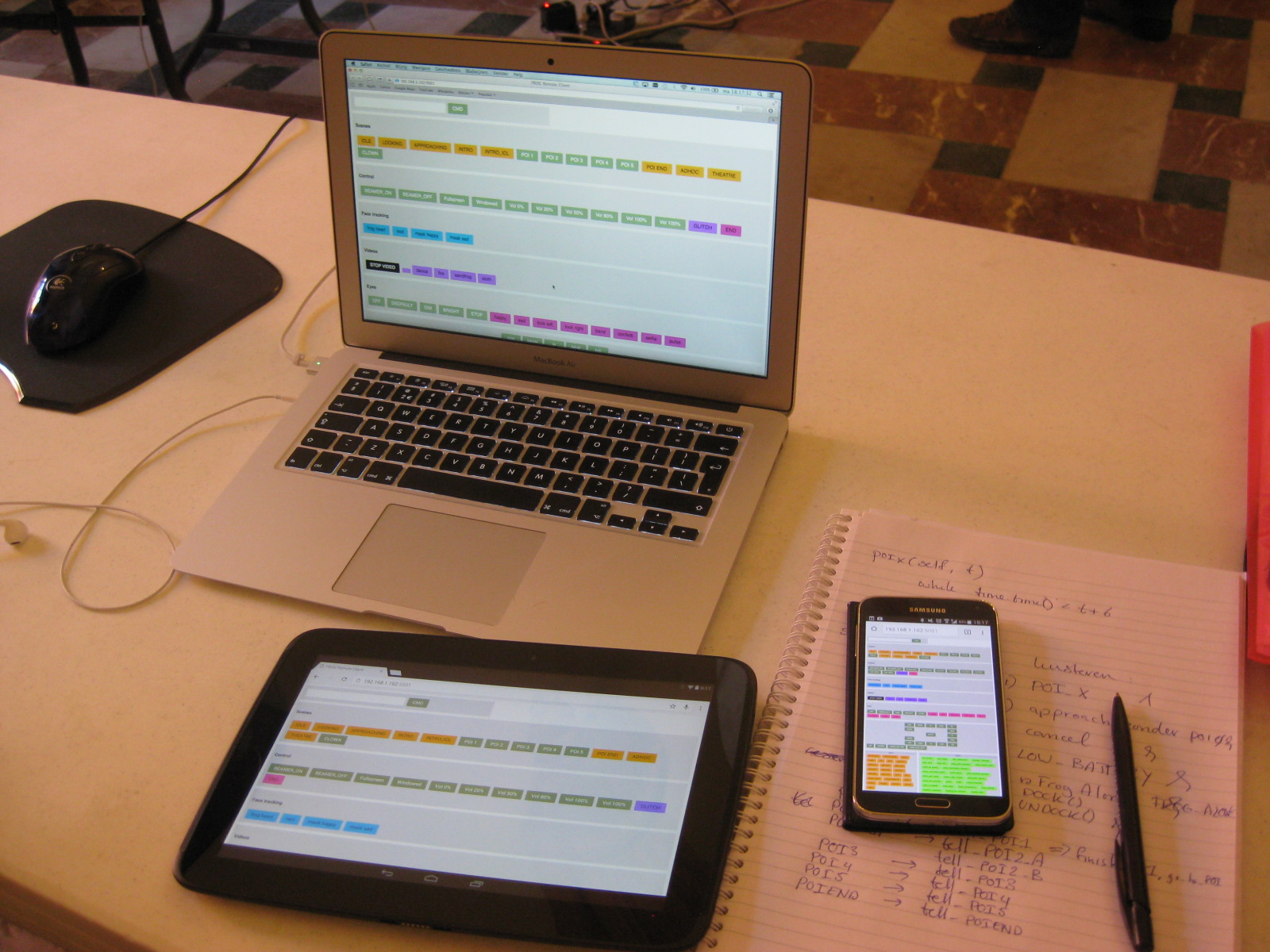
Yesterday, while the FROG was powered-down for hardware enhancements, Randy Klaassen and Jan Kolkmeier from the University of Twente added some features to their FROG Wizard-of-Oz web interface.
They designed and implemented this web interface to control not only the output of specific AR content but also to trigger chosen steps from the State Machine.
This interface is not used for the FROG tour when the robot is running autonomously but is a splendid tool for experiments or testing as it can trigger specific states or abilities. It can also be used to keep the FROG in action in the case f really bad weather as it can be used to run just the indoor parts of the robot mission.
FROG’s WOZ web interface runs on any device – here on a laptop, a notepad and a smartphone.
This is mini-FROG – it is actually only 28 cm tall and has been around for some time – but in secret.
mini-FROG was made for an online experiment. It is a simplified model of the FROG robot executed in cardboard, coloured paper and hobby foam – oh, and a drinking straw. It has a glossy see-through film so that different visuals can be put onto its ‘screen’.
mini-FROG’s art gallery was a table top with postcard sized masterpieces hung on the wall behind it. Stop-motion films lasting about a minute and a half were made using this setup . The films were put online and more than 200 people from all over the world answered questions about them to help our PhD candidate with her research.
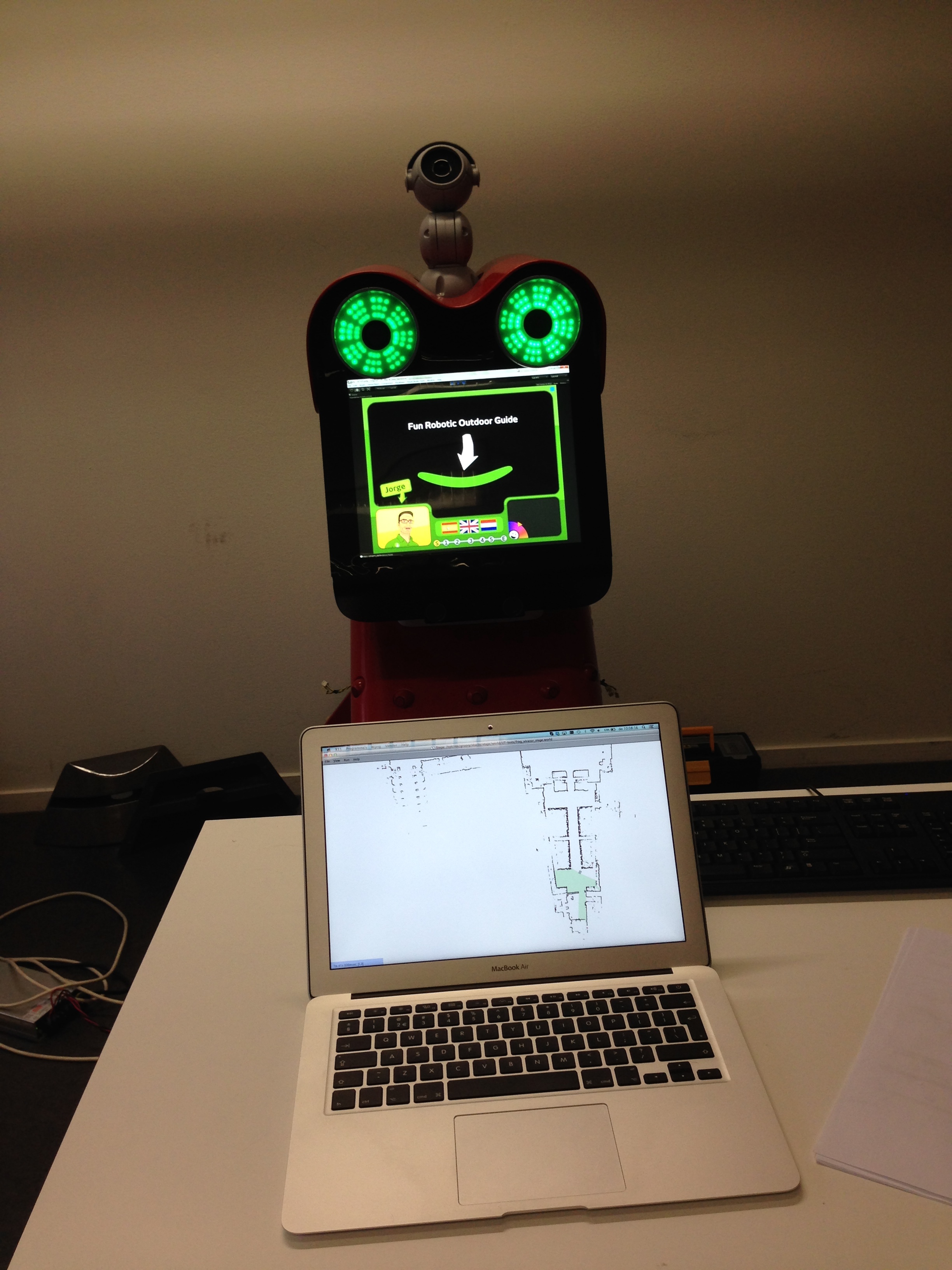
This week the guys from UT are using UPO’s simulation environment on the protoFROG (the UT Campus robot) to test some new features for guiding missions.
From the 15 to the 26 of September, FROG (the green one) will be running these missions for experiments and evaluation tests at the Royal Alcázar in Seville. Unlike this simulation, the FROG will actually be driving around to run its missions.
UPO simulator running on a laptop. The robot is showing its content relevant to the location that the simulator has reached.The simulation setup. As you can see, the robot isn’t going anywhere. And, the researchers have recently been working late and have forgotten to take out the empties. Fortunately the pizza boxes had disappeared.
The UT Campus robot is having some problems at the Hannover Messe. On the first day it drove around until lunchtime but now protoFROG is at a standstill. This is an outdoor robot with a lot of traction power and the loose-laid carpet is causing the motors to overheat during rotation. Although, by the look of it there is not always that much room to manoeuvre, anyway.
The FROG robot was defined to run outdoors, specifically for the EU project in the Lisbon Zoo and in the Royal Alcázar in Sevilla. As the robot must not only navigate the various terrains at these sites but also be able to turn on the spot the project has been having some difficulties with their choice of tires. What would you choose for a 100 kilo robot that has to handle clean-swept tarmac and paving, either of which may later be strewn with olive stones from the trees. This is the terrain in the Lisbon zoo – and the robots mission also includes some inclines and ramps. Then move the same robot to Sevilla where it has to go from neat paved courtyards onto tiled or marble floors.
And in the past two weeks, protoFROG has had to cope with gravel strewn tarmac, TV studios, and now, loose-laid carpet. That’s a lot to deal with for a prototype.
Yesterday, FROG co-ordinator Vanessa Evers took protoFROG the UT’s Campus robot and a group of young researchers to Amsterdam to appear in the Pauw & Witteman late-night talk show. You can find the interview here – in Dutch. And here is some behind-the-scenes footage – also in Dutch.
A collaborative project under the FP7-ICT-2011.2.1 Cognitive Systems and Robotics (a), (d) area of activity.