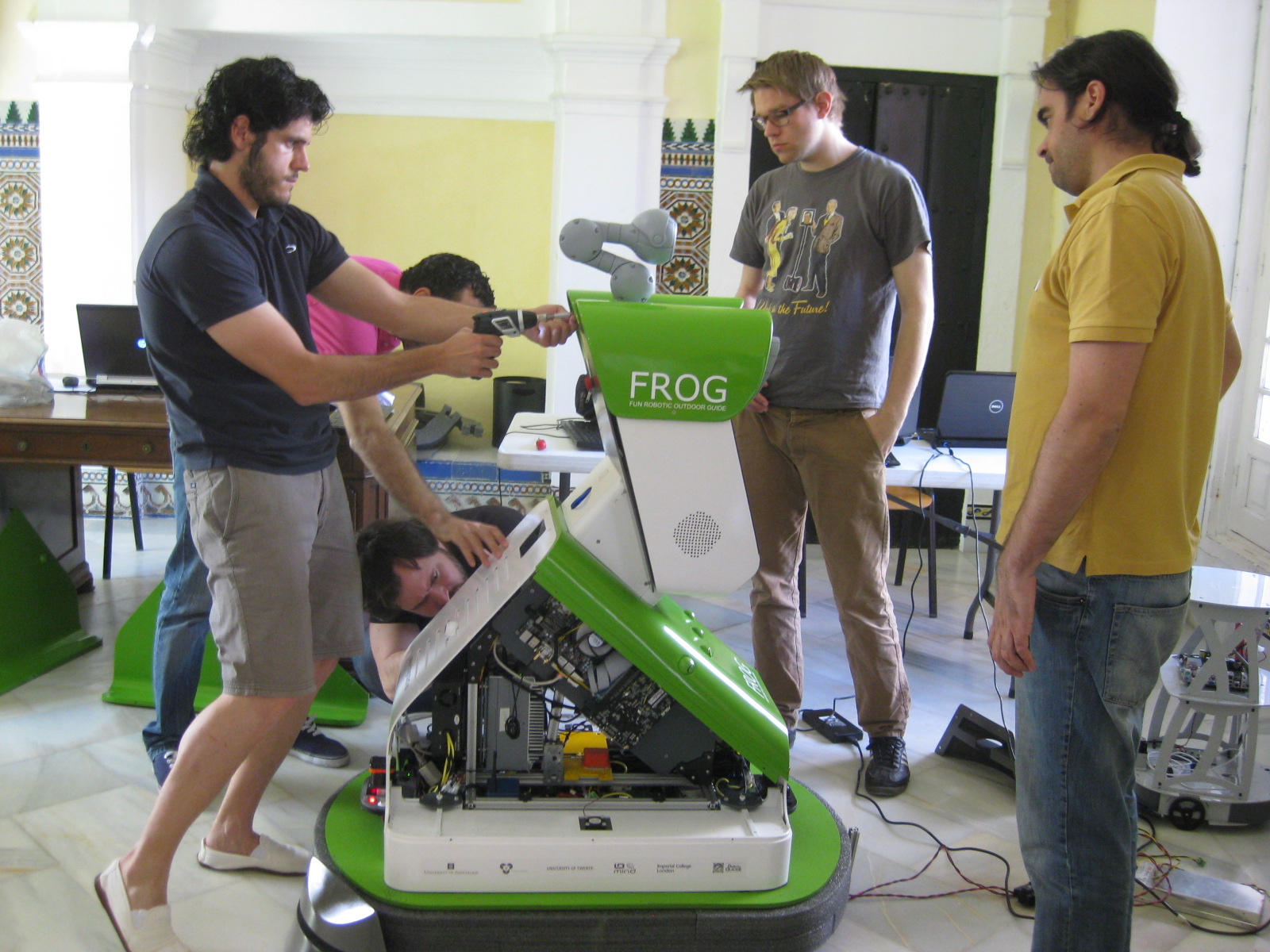
Paulo Alvito and Carlos Marques have been working together to place 2 new fans, adjust the position of the projector (so that it no longer touches the window in the shell), reinstate the function of the Electronics Power Button (UPO had put in an override to power down the UvA cameras) and install a new device to power down the Dalsas and the lasers, and touch up FROG’s paintwork. You’ll find Piggy on the corner of the desk where he can survey his domain.
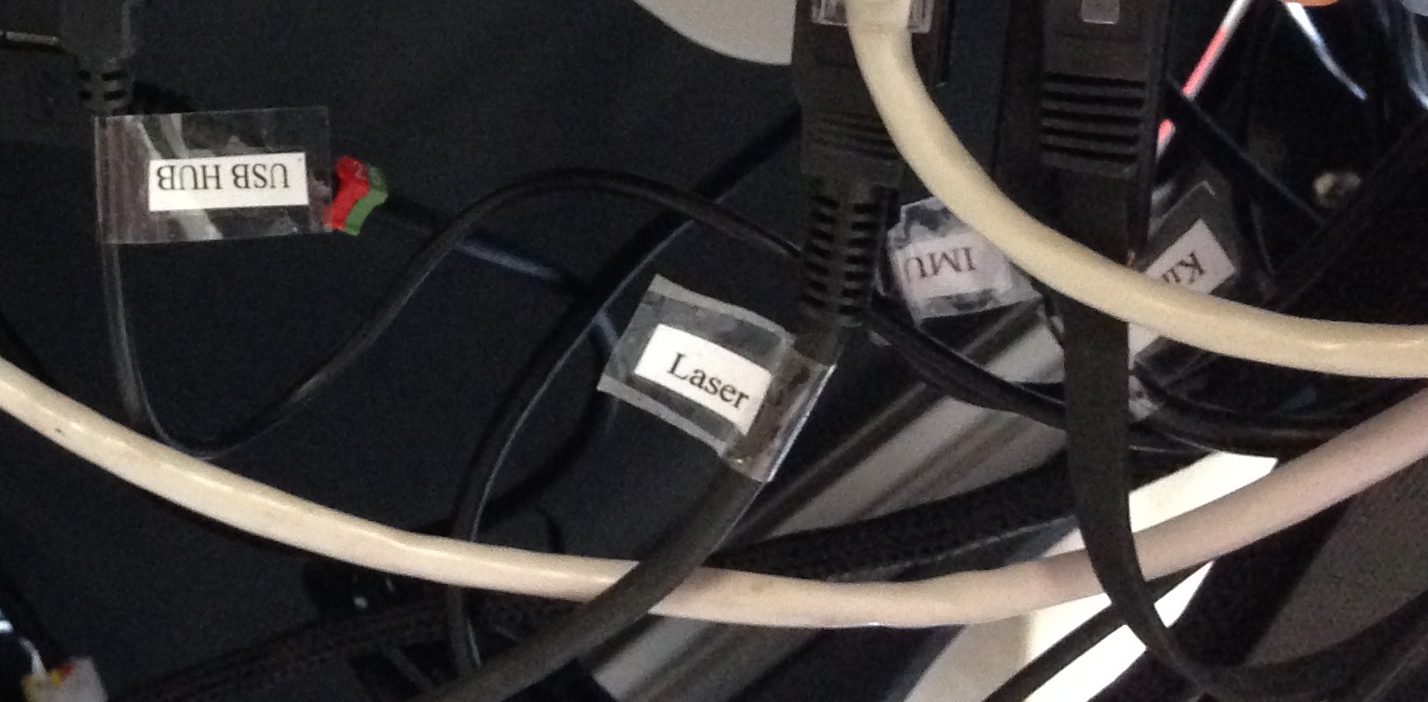
Later, Carlos will install a new, small controller board on the docking station. Using sensors, this will detect the robot when it enters the docking station and consequently turn on the power to the docking station. As soon as the FROG leaves the docking station the controller will turn the power off again. This is an important safety measure. The docking station will be left unattended in the shop at the main entrance to the Royal Alcàzar where (obviously) visitors (and therefore children) can enter at any time.
Controller board for the docking station: it will be installed under the surface.
We arrived at the Alcázar this morning to find that our lab in the Tennis Court had been taken over by a film crew – the film crew of the TV series Violetta, no less! This was not exactly according to plan but as always the Royal Alcázar came up with a quick solution – a temporary lab for us until after filming.
Violetta has a large crew and, it would seem, a larger group of uniformed security guys with walkie-talkies. Unfortunately they wouldn’t let us take any photo’s while they were filming so we’ll just have to watch the series to see them in our lab. But, here’s one of the security chaps with a mobile as well as a walkie-talkie.
The UT Campus robot is having some problems at the Hannover Messe. On the first day it drove around until lunchtime but now protoFROG is at a standstill. This is an outdoor robot with a lot of traction power and the loose-laid carpet is causing the motors to overheat during rotation. Although, by the look of it there is not always that much room to manoeuvre, anyway.
The FROG robot was defined to run outdoors, specifically for the EU project in the Lisbon Zoo and in the Royal Alcázar in Sevilla. As the robot must not only navigate the various terrains at these sites but also be able to turn on the spot the project has been having some difficulties with their choice of tires. What would you choose for a 100 kilo robot that has to handle clean-swept tarmac and paving, either of which may later be strewn with olive stones from the trees. This is the terrain in the Lisbon zoo – and the robots mission also includes some inclines and ramps. Then move the same robot to Sevilla where it has to go from neat paved courtyards onto tiled or marble floors.
And in the past two weeks, protoFROG has had to cope with gravel strewn tarmac, TV studios, and now, loose-laid carpet. That’s a lot to deal with for a prototype.
All this week João Freire from IDMind has been working on the protoFROG Campus robot here at the University of Twente. His colleagues, Carlos Marques and André Almeida can be seen in the laptop screen. They were working from Lisbon via Skype to get the content that was prepared by the Marketing & Communications department of the university for the Royal opening of the Gallery.
We have just heard from IDMind that the Campus robot (aka protoFROG) is all ready to be shipped to the Netherlands where it will take part in a very special ceremony. A few days later it will travel on to the Hannover Messe.
Here we can see Paulo Alvito, an important member of the FROG consortium, reflected in the touchscreen of the proto-FROG. This was taken in March 2014 – IDMind had just completed the configuration of the UT Campus robot ready for the Hannover Messe.
protoFROG is actually the UT Campus robot. It is a prototype of the FROG robot with demos of some of the functionalities that are being developed in the FROG project.
The protoFROG will be at the Hannover Messe on the stand from Monday 7 April to Wednesday 9 April.
FROG is on its way to Seville for the next Integration meeting at the Real Alcázar. The UPO team will make a final map of the Real Alcázar route in preparation for the arrival of the other partners on 24 February 2014.
A collaborative project under the FP7-ICT-2011.2.1 Cognitive Systems and Robotics (a), (d) area of activity.