For the project, an array microphone was temporarily fitted to the red FROG so that it could pick up questions asked by visitors to the museum. Due to the high noise levels they encountered the, otherwise successful, project used a Wizard-of-Oz set-up to answer questions. The results of the project will help in the further development of the R3D3 receptionist robot.
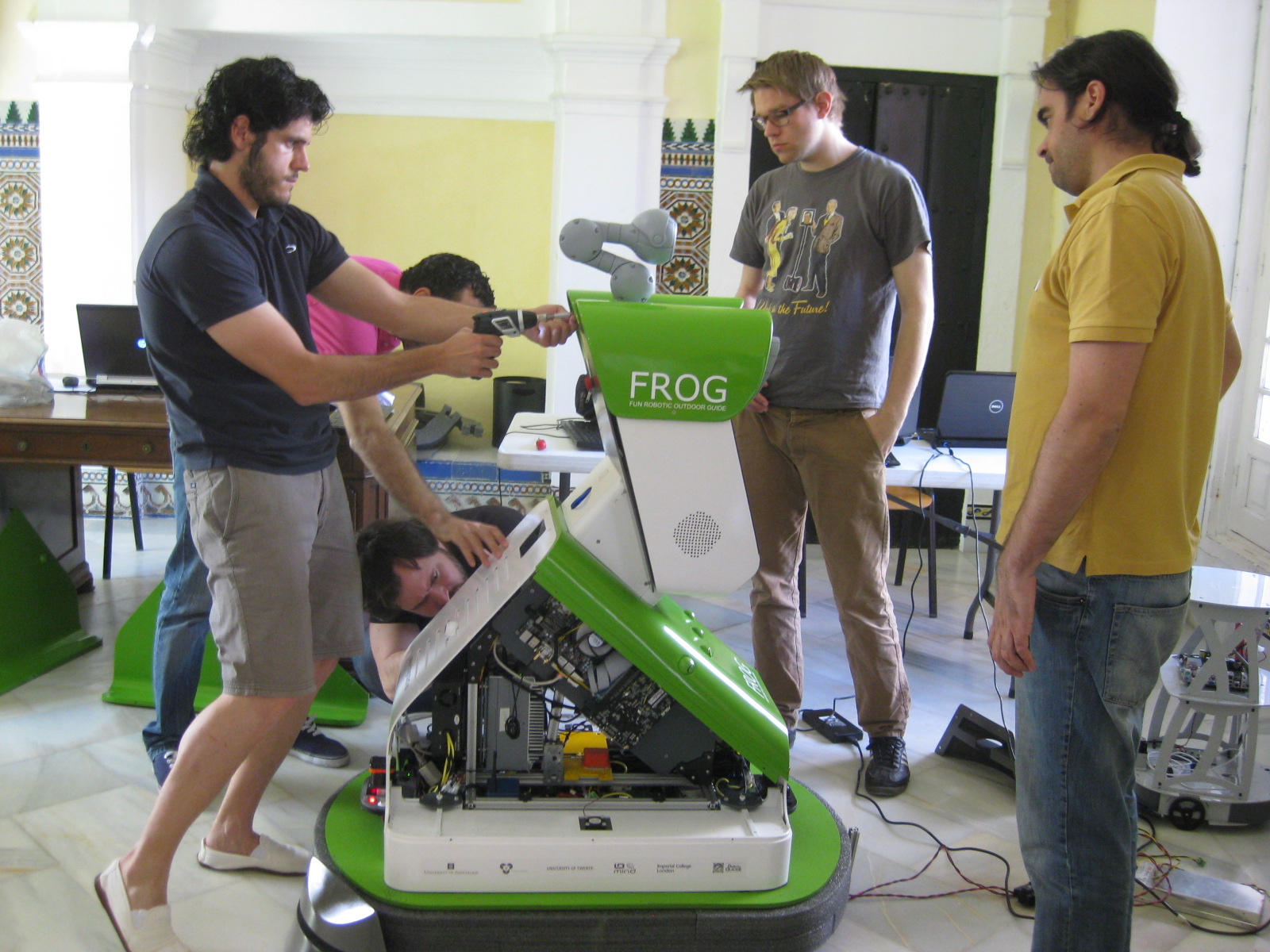
Yesterday, while the FROG was powered-down for hardware enhancements, Randy Klaassen and Jan Kolkmeier from the University of Twente added some features to their FROG Wizard-of-Oz web interface.
They designed and implemented this web interface to control not only the output of specific AR content but also to trigger chosen steps from the State Machine.
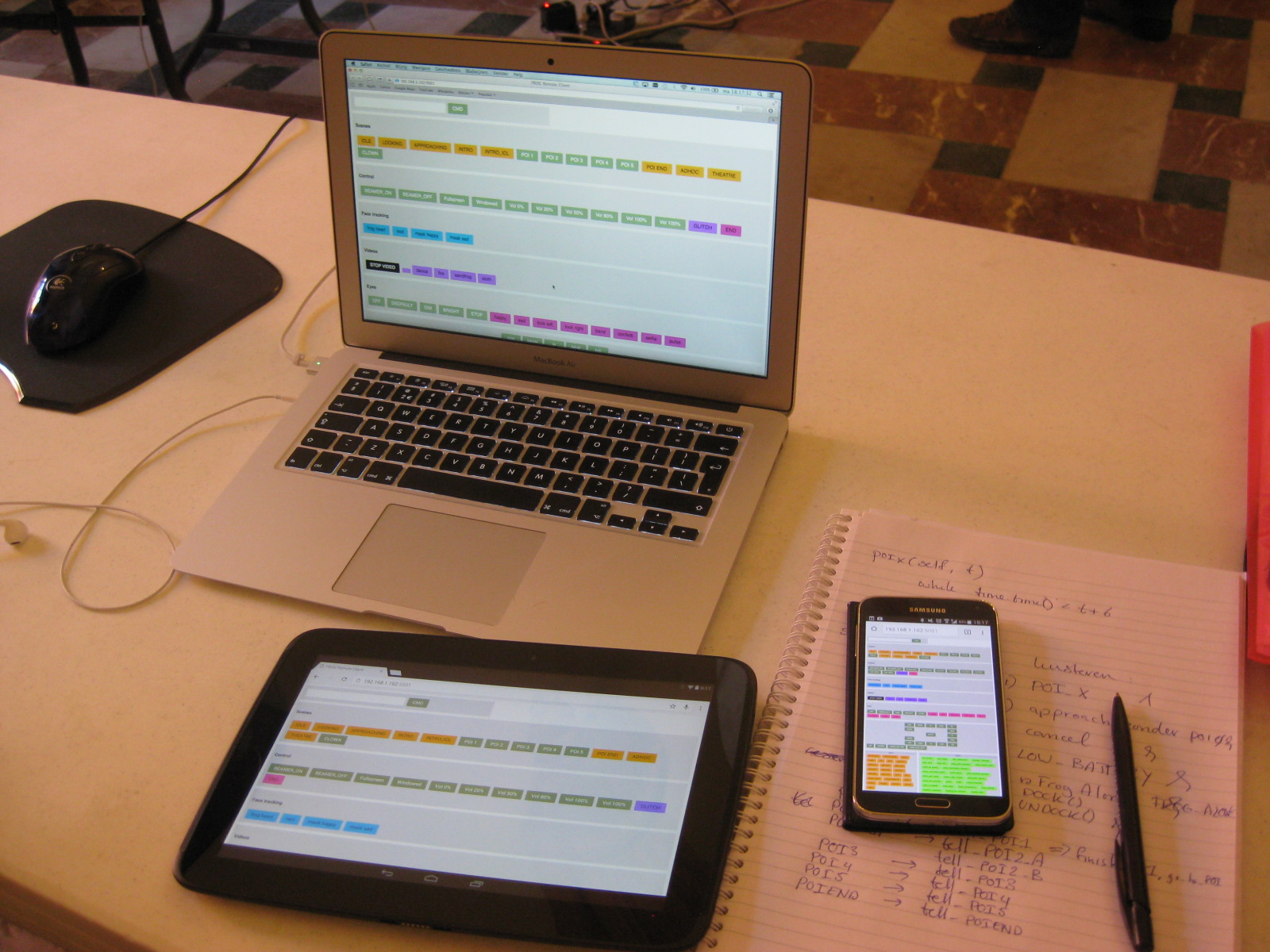
This interface is not used for the FROG tour when the robot is running autonomously but is a splendid tool for experiments or testing as it can trigger specific states or abilities. It can also be used to keep the FROG in action in the case f really bad weather as it can be used to run just the indoor parts of the robot mission.
FROG’s WOZ web interface runs on any device – here on a laptop, a notepad and a smartphone.
Another thing that has changed since are last visit is tapestry with the map of Europe. The AR overlay was achieved by defining markers (the position of a number of specific features) on a photo of the original to build a model. These markers then had to be recognised by the FROG using incoming information from the antenna’s camera so that these could used to aim the overlay. The same set of markers was defined in the overlay and these had to match up to the features in the tapestry (the target) so that the overlay would be correctly positioned in the resulting overlay projection. All of this is necessary as, due to its autonomous social navigation, the FROG may stop at a different location in the hall on each separate tour.
Ripples in a tapestry that is five and a half by nearly four metres can be quite large – and they are not always in the same place.
Too many ripples in the tapestry at any time could mean that the feature markers cannot be recognised. Of course, there are several solutions to compensate for differences in the folds in the tapestry between tours. This would take some time to implement and as we have some more pressing matters for this session a quick solution was chosen. This involves using the whole tapestry area as a target instead of specific points on the target. Not as elegant as it could be but certainly a neat solution for a proof of concept.
FROG is back at the Royal Alcàzar in Seville. A lot can happen to your tour in a couple of months. A grand refurbishment means that the entrances on one side of the toilets have been blocked. This was where the FROG announced: “The toilets are over there!” while driving to the next point of interest. So, a quick recode was necessary. Should you be in Seville at the moment and should you visit the Alcàzar, you can find toilets near the cafeteria in the gardens.
The toilets are NOT over there!Workmen are busy improving the facilities and there will be entrances on just one side.
The toilets near the cafeteria are surrounded by jasmine hedges.
Recalibrating the first location of the tour after what had looked like a promising position to place the robot turned out to be a fountain. This is one example of the small matters that have to be checked on location during integration sessions. The location was pinpointed for use by researchers from the Netherlands on a map generated by the researchers from Seville. The map was good enough to show a feature – local knowledge was required to know what the feature was. And the correction took only seconds once a perfect spot had been chosen.
Fountain in the Lion’s Courtyard
A collaborative project under the FP7-ICT-2011.2.1 Cognitive Systems and Robotics (a), (d) area of activity.
 In June 2016, students from the UT took the Campus robot to the NEMO Science Museum in Amsterdam. They were using the red FROG as a robot platform to demonstrate their project work, part of the R3D3, the Rolling Receptionist Robot with Double Dutch Discourse project.
In June 2016, students from the UT took the Campus robot to the NEMO Science Museum in Amsterdam. They were using the red FROG as a robot platform to demonstrate their project work, part of the R3D3, the Rolling Receptionist Robot with Double Dutch Discourse project.